




Als eine von 15 Proband*innen durfte ich den neuen „Robo-Trainer“ testen.
Eines, was ich besonders an meiner Arbeit an der Sporthochschule mag, ist, Forschungsprojekte live miterleben zu können. Mit live meine ich nicht nur, dabei zu sein und Fotos oder Videos zu machen, sondern mich aktiv als Probandin zur Verfügung zu stellen. So erlebt man die Leidenschaft für ein bestimmtes Thema, die Präzision in der Ausführung und die Zukunftsvision der Wissenschaftlerinnen nochmal auf eine ganz andere Art.
Nachdem ich meinem sowieso schon vom Leistungssport ramponierten Rücken bei meinem letzten Engagement als Probandin (einer intensiven Laufstudie mit unterschiedlich gestützten Laufschuhen) alles abverlangt habe, schien es mir besonders passend, jetzt bei einer Rollator-Studie mitzumachen. Aber: kein herkömmlicher Rollator – ein robotischer Rollator!
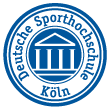
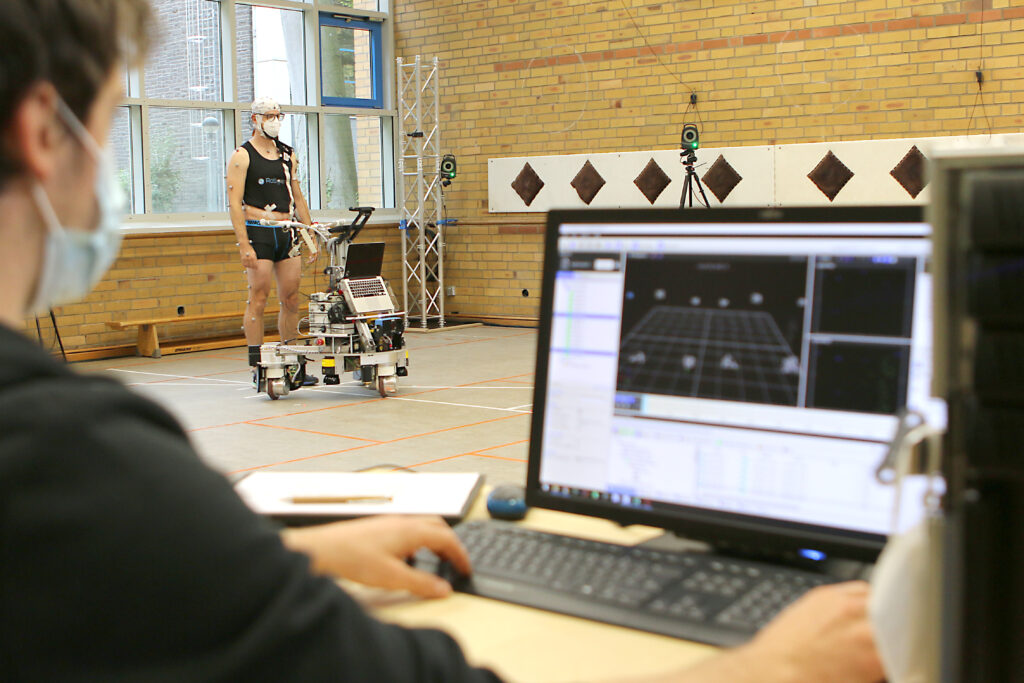
Dass ich den Roboter als eine von nur 15 Proband*innen tatsächlich testen durfte, ist – zugegeben –eher einem Zufall geschuldet. Eigentlich war ich in Halle 7, um Fotos und Filme bei der Roboter-Testung zu machen – mein Job an der Spoho. Während des Fotoshootings stieg bei mir die Neugier: Wie fühlt es sich wohl an, diesen blinkenden Koloss – genannt „Robo-Trainer“ – mit Hilfe eines Fahrradlenkers zu steuern? Besonders vertrauenserweckend sah das Ding nicht aus. Eher ulkig und abgespaced.

Vielleicht liegt es daran, dass sich die projektverantwortliche Professorin, Kirsten Albracht, neben der Robotik auch für Raumfahrt interessiert und seit Jahren in diesem Bereich forscht. Oder daran, dass Denis Štogl vom Karlsruher Institut für Technologie, der den Roboter gebaut hat, LED-Streifen mag, die blau und grün blinken. Ich weiß es nicht. Jedenfalls habe ich bei Kirsten Albracht nachgefragt: „Wie steuert sich dieses Gerät?“. Kirsten Albracht: „Es fährt sich schon ganz gut. Willst du testen? Heute Abend ist noch ein Platz frei.“ Ein paar Stunden später und einen eiligen Abstecher nach Hause, um eine passende Hose zu besorgen, stand ich wieder in Halle 7. Diesmal auf der anderen Seite der Kamera. Wieder Corona-konform mit Mund-Nase-Schutz.
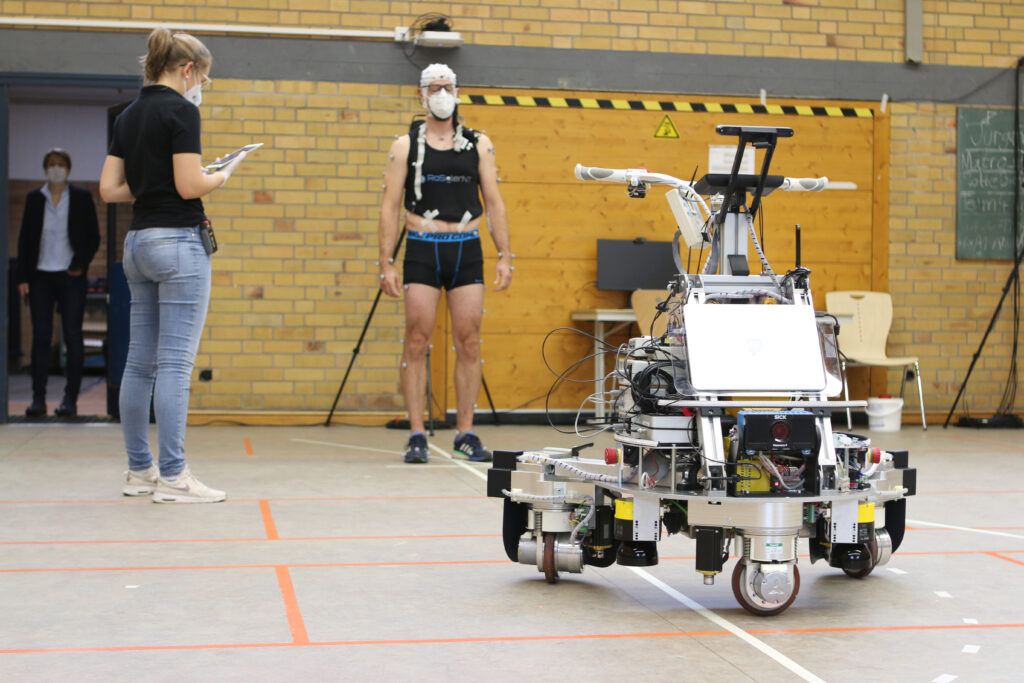
Zunächst klebte mir Jule, studentische Mitarbeiterin im Projekt, reflektierende Marker auf den Körper. Insgesamt 56 Stück. Sie ermöglichen den Wissenschaftler*innen, eine 3D-Analyse meiner Bewegung anzufertigen. So können sie später genau abbilden, wie ich den Rollator schiebe und wie mein Körper auf bestimmte Test-Szenarien reagiert.


Zusätzlich stattete mich Dr. Petra Wollseiffen mit einer Neuro-Kappe aus. Kommentar: „Es ist immer wieder interessant, wie unterschiedlich die Kappen bei verschiedenen Menschen aussehen können.“ So sieht sie bei mir aus:

Petra Wollseiffen ist Expertin für Hirnströme. Sie interessiert sich dafür, wie die Proband*innen die Zusammenarbeit mit Robotern wahrnehmen. Mit Hilfe eines mobilen Elektroenzephalogramms, meist kennt man das Gerät unter der Abkürzung EEG, misst sie während der ganzen Testung die zentralnervöse Aktivität der Proband*innen. Um eine gute Leitfähigkeit von der Kopfhaut auf die Elektroden der Neuro-Kappe herzustellen, füllt sie die Unterseite der Kappe mit Hilfe einer stumpfen Spritze mit einem hellblauen, glibberigen Gel. Spoiler: Das Gel lässt sich beim Haarewaschen problemlos entfernen.


Die Kombination aus den Daten der Bewegungsanalyse und des EEGs macht es den Forscherinnen zum ersten Mal möglich, einen Zusammenhang zwischen der zentralnervösen Aktivität bei Alltagsbewegungen und dem individuellen Bewegungsverhalten herzustellen. Besonders relevant sind diese Erkenntnisse, um psychosoziale Aspekte der Zusammenarbeit mit Robotern wie Technikakzeptanz, Angst und Vertrauen abzubilden. Werden robotische Assistenzsysteme erst einmal als „Trainingspartner“ akzeptiert, können sie optimal Trainingsreize setzen und so zum Beispiel das Risiko von Überbelastungen minimieren. Das Besondere an RoSylerNT: Im Gegensatz zu den derzeitigen Systemen, die Menschen bei ihren eigenen Bewegungen unterstützen, bringen Roboter wie der Robo-Trainer aktiv Kräfte auf und wirken so auf den Menschen ein.
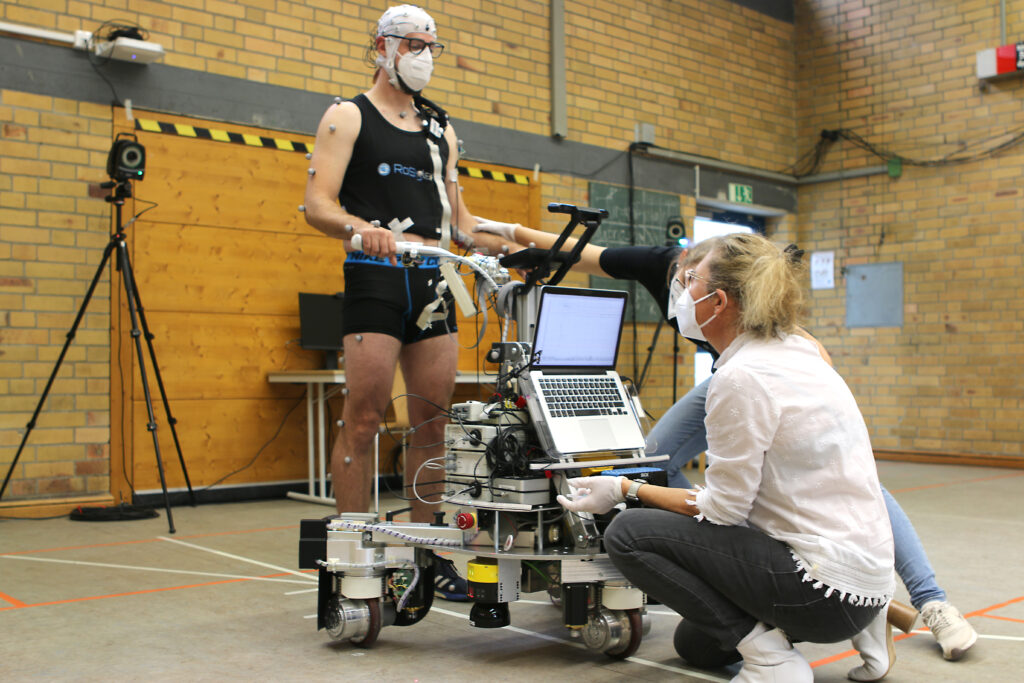
Nach umfangreicher Vorbereitung konnte der Test starten. Mitten in der Halle mache ich zunächst beäugt von 15 im Raum verteilten Infrarot-Kameras, den zwei Wissenschaftlern Denis Štogl und Fabian Göll an PCs, den beiden Projektverantwortlichen Prof.‘in Kirsten Albracht und Dr. Björn Braunstein, der Hirn-Spezialistin Dr. Petra Wollseiffen und Studentin Jule für die Kalibrierung der Geräte Bewegungen mit Armen und Beinen. Mit geschultem Auge macht mich Biomechaniker Dr. Björn Braunstein dabei mit einem Augenzwinkern darauf aufmerksam, dass meine Flexibilität in der linken Schulter zu wünschen übrig lässt. Eine Tatsache, die mich kurzfristig etwas aus dem Konzept bringt, an deren Beseitigung ich mittlerweile aber arbeite.

Trotz meiner unflexiblen Schulter kann die Kalibrierung problemlos abgeschlossen werden. Dem Test steht nichts im Weg. Zunächst schiebe ich einen herkömmlichen Rollator mehrfach auf einer markierten Strecke von A nach B. Am Ende der Strecke komme ich immer am selben Punkt zum Stehen, drehe mich um und fahre wieder zurück. Das Ganze einmal auf einer Gerade, einmal auf einer Bahn mit Links- und Rechtskurve.

Bisher bin ich noch nie mit einem Rollator gefahren. Ich bin etwas überrascht, wie wackelig ein Rollator ist – so etwas Klappriges soll Menschen, die nicht mehr gut zu Fuß sind, eine Hilfe sein?! Wirklich aufstützen würde ich mich darauf nicht. Zumindest nicht ohne Bedenken, dass der Rollator wegfährt und ich umfalle.
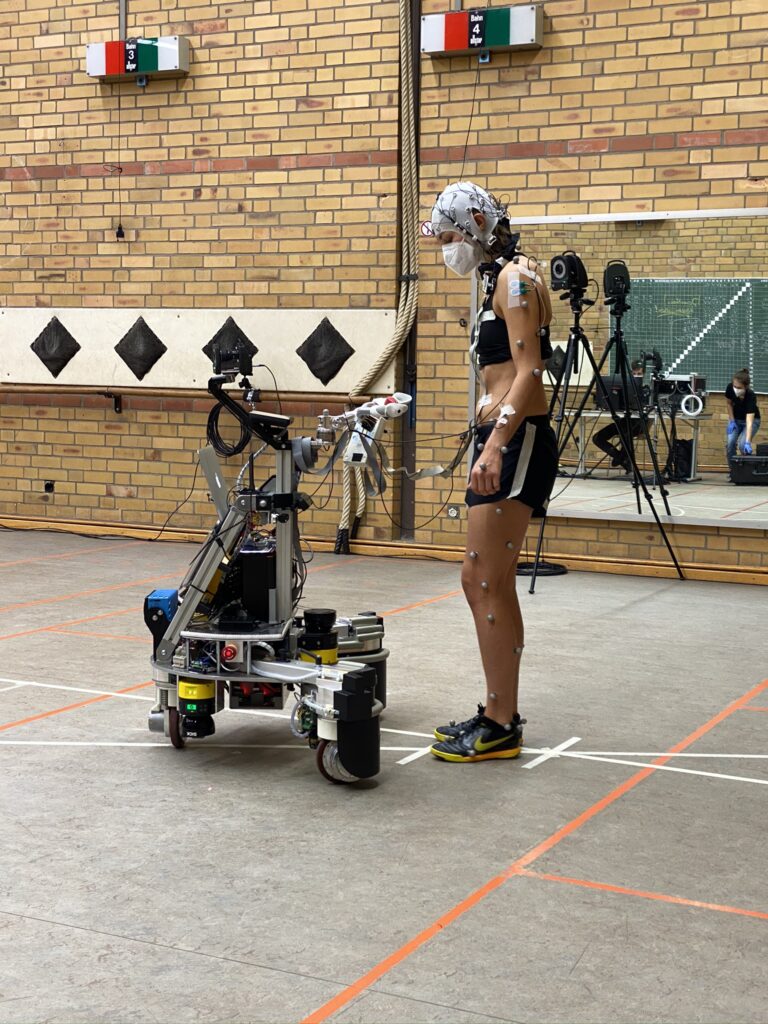

Ganz anders fühlte sich später der Robo-Trainer an. Mein erster Impuls, als „Rosy 2“ – wie ich ihn nenne – per Fernsteuerung zu mir zum Startpunkt navigiert wird ist, ihn zu begrüßen: „Hallo!“. Schon etwas verrückt, dass ein Roboter einem sympathisch sein kann, aber bei Rosy 2 ist es so. Vielleicht gerade, weil die Optik noch nicht perfekt ist, weil man genau sieht, wo Kameras verbaut sind, wo die Kabel verlaufen und vielleicht auch, weil der Fahrradlenker mir vertraut ist von meinem täglichen Weg zur Arbeit. „Rosy, let’s go!“
Zunächst ist es gewöhnungsbedürftig, den Robo-Trainer zu steuern. Durch seinen massiven Aufbau ist der Roboter viel schwerer als ein herkömmlicher Rollator, fühlt sich gleichzeitig aber auch mehr wie eine verlässliche Stütze an. Mit Rosy 2 laufe ich denselben Parcours ab, wie mit dem Rollator. Geradeaus, stehenbleiben, umdrehen, zurückfahren, stehenbleiben, umdrehen, fahren, stehenbleiben, umdrehen, fahren, stehenbleiben, NOTBREMSUNG.
„Oh jeh! Habe ich den Versuch ruiniert?“ Das ist zumindest mein erster Impuls, als der Robo-Trainer auf meiner dritten Fahrt am Ende der Geraden plötzlich eine Notbremsung einlegt. Die Versuchsleiter*innen klären mich auf: Weil ich Rosy 2 etwas zu dynamisch an den Endpunkt der Teststrecke gesteuert habe, löste die automatische Notbremse aus. Das sei so gewollt und wäre bisher bei allen Testdurchläufen passiert. Interessant ist nur: Wie viele Notbremsungen provoziere ich im Rahmen meines Tests? Im Endeffekt kann ich meinen guten Schnitt von nur einer Notbremsung nicht halten. Einmal auch deshalb, weil ich Rosy 2 offenbar zu nah an meinen Fuß manövriere. Bevor ich es überhaupt realisiere, legt der Roboter die Notbremsung ein und rettet meinen Fuß vor einem ordentlichen blauen Fleck.
Im Laufe der Testung merke ich, wie schnell ich mich an die neue Steuerung gewöhne. Auch deshalb kommen – glaube ich – noch ein, zwei Notbremsungen hinzu. Ich bin schnell zu sicher in der Handhabung, deshalb etwas zu schnell unterwegs und der Robo-Trainer vielleicht noch ein kleinwenig zu sicher eingestellt. Angst, eingequetscht oder gar von Rosy 2 überfahren zu werden, habe ich nicht.
Besonders spannend finde ich die Zusatzaufgaben, die zu einem bestimmten Zeitpunkt in den Test integriert werden. Der Robo-Trainer macht dann zum Beispiel unvorhergesehene eigenständige Bewegungen, die ich ausgleichen muss. In meinem Fall bricht der Roboter automatisch nach link aus. Ich muss ihn dann wieder zurück auf die Gerade lenken. Kognitiv anspruchsvoller wird es, als in einem Test-Szenario die Steuerung invertiert wird. Das heißt: Wenn ich den Roboter nach links schieben will, fährt Rosy 2 nach rechts und umgekehrt. Den Parcours kann ich trotzdem gut meistern, beim Stoppen und umdrehen wird es schwierig.
Nachdem ich selbst mit Rosy 2 „trainiert“ habe, kann ich mir besser vorstellen, wie man einen robotischen Roboter in ein Bewegungstraining integrieren kann. Aufgaben wie das Ausbrechen aus einer vorgegebenen Spur oder das Invertieren der Steuerung könnten zum Beispiel Ältere dabei unterstützen, sich sicherer fortzubewegen oder schneller auf ungewohnte Situationen zu reagieren. Genau dafür soll der Robo-Trainer auch irgendwann eingesetzt werden, wie Professorin Kirsten Albracht mir erklärt. Das Besondere: Der Roboter lernt, sich an die Person anzupassen, die ihn steuert. Er kann aktiv Kräfte aufbringen und dadurch für den Menschen zum interaktiven Helfer werden. Daher auch der Projekttitel „RoSylerNT“; ausgesprochen „Rosy lernt“. Die Testungen helfen dabei, die Mensch-Maschine-Interaktion und das Lernverhalten von Rosy 2 weiterzuentwickeln und die Bedienung möglichst intuitiv zu gestalten.
Nach zwei Stunden hin und her fahren auf Geraden und in Kurven bin ich am Ende doch etwas froh, die Testung hinter mir zu haben. Es war spannend zu sehen, was Rosy 2 schon alles kann und einen Eindruck davon zu bekommen, was der Roboter mit Hilfe der Testungen noch alles lernen wird. Im Nachgang verrät mir Roboter-Papi Denis Štogl noch ein Geheimnis: Die Störungen, die bei meiner Testung eingebaut waren, sind erst der Anfang. Der Robo-Trainer kann schon jetzt viel mehr. Nur kommen die Menschen, die Rosy 2 steuern, bei den komplexen Aufgaben bisher nicht mit. Gut, dass die Notbremsung so zuverlässig funktioniert.

Und hier noch ein Video für die Technik-Interessierten: Denis Štogl erklärt die Software, mit Hilfe der er den Roboter während der Testung beobachtet.
Autorin: Marilena Werth, Abteilung Presse und Kommunikation der Deutschen Sporthochschule Köln